RoPE 旋转位置编码
LLaMA、GLM 模型采用。
线性变换与旋转矩阵
旋转矩阵是一类特殊的线性变换矩阵。
有一类特殊的线性变换,叫做正交变换(其对应的矩阵称为正交矩阵)。这类变换的一个核心特性就是保角性,即变换前后任意两个向量之间的夹角保持不变。最常见的例子就是旋转矩阵。同时大小保持不变。
绝大多数线性变换都不具备保角性。它们会拉伸、压缩、剪切空间,从而改变角度。
位置编码
Transformer Architecture: The Positional Encoding - Amirhossein Kazemnejad's Blog
这篇文章介绍了为什么需要位置编码:(9 封私信 / 75 条消息) 一文读懂Transformer模型的位置编码 - 知乎
主要原因: Transformer 模型本身不具备像 RNN 那样的学习词序信息的能力,需要主动将词序信息喂给模型。
简单想一想,很远之前的一个 the 和我们将要 decode 的这个 token 前面的一个 the 位置是不一样的,对于下一个 token 的贡献也不应该是一样的。但是如果我们不加入位置编码,这两个位置的 the 对于下一个 token 的 attention 值($QK^T$)是一样的,也就是我们需要投入相同的注意力,这是明显不合理的。
当然,没有像 RNN 一样的位置信息引入了另外一个好处,就是我们可以并行处理所有的 token,而 RNN 只能一个一个地处理,这极大地加快了 Transformer 结构的处理速度,是成也萧何,败也萧何。
简单想想:
我们能想出来两种方法:
- 让所有的 token 的位置编码等间距散落在 $[0,1]$ 区间,有以下两个问题:
- 不同的句子长度,区间内每一个步长是不一样的;
- 1, 2, 3 这么一直排下去给每一个 token:
- 值可能会很大,对于神经网络学习很不利;
- 可能学习的时候长度比推理的长度短,导致没有学习到。
对编码的要求:
- 每一个位置有一个唯一编码;
- 两个位置之间的 step 应该是固定的,不应该和句子的长度有关;
- 能够泛化到更长的句子;
- 不能是随机的,必须是确定的。
初始的位置编码是如何实现的?
首先,这种编码不是单一的一个数值,而是包含句子中特定位置信息的 $d$ 维向量(和词向量一个维度,这是为了方便后面直接加到词向量上面,让词向量也带上了位置信息)。
给定一个长度为 $n$ 的输入 token 序列, $t$ 表示 token 在序列中的位置,$\overrightarrow{p_t} \in \mathbb{R}^d$ 用来表示 $t$ 这个位置的位置向量(p = position)。可见我们需要一个函数 $f: \mathbb{N}\rightarrow \mathbb{R}_d$ 来将位置映射到向量,定义如下:
\[\begin{array}{c} \overrightarrow{p_t}^{(i)}=f(t)^{(i)}:=\left\{\begin{array}{ll} {\sin \left(\omega_k \cdot t\right),} & {\text { if } i=2 k} \\ {\cos \left(\omega_k \cdot t\right),} & {\text { if } i=2 k+1} \end{array}\right. \tag{1} \end{array}\]其中:
\[\tag{2} \omega_k=\frac{1}{10000^{2 k / d}}\]注意 $i$ 表示这个向量里面的第 $i$ 个元素。分成了基数和偶数的情况。
\[\begin{array}{c} \overrightarrow{p_t}=\left[ \begin{array}{c} {\sin (\omega_1 \cdot t)} \\ {\cos (\omega_1 \cdot t)} \\ {\sin (\omega_2 \cdot t)} \\ {\cos (\omega_2 \cdot t)} \\ {\vdots} \\ {\sin (\omega_{d / 2} \cdot t)} \\ {\cos (\omega_{d / 2} \cdot t)} \end{array} \right] \\ \end{array}\] \[\begin{align} 0: \ \ \ \ \color{orange}{\texttt{0}} \ \ \color{green}{\texttt{0}} \ \ \color{blue}{\texttt{0}} \ \ \color{red}{\texttt{0}} & & 8: \ \ \ \ \color{orange}{\texttt{1}} \ \ \color{green}{\texttt{0}} \ \ \color{blue}{\texttt{0}} \ \ \color{red}{\texttt{0}} \\ 1: \ \ \ \ \color{orange}{\texttt{0}} \ \ \color{green}{\texttt{0}} \ \ \color{blue}{\texttt{0}} \ \ \color{red}{\texttt{1}} & & 9: \ \ \ \ \color{orange}{\texttt{1}} \ \ \color{green}{\texttt{0}} \ \ \color{blue}{\texttt{0}} \ \ \color{red}{\texttt{1}} \\ 2: \ \ \ \ \color{orange}{\texttt{0}} \ \ \color{green}{\texttt{0}} \ \ \color{blue}{\texttt{1}} \ \ \color{red}{\texttt{0}} & & 10: \ \ \ \ \color{orange}{\texttt{1}} \ \ \color{green}{\texttt{0}} \ \ \color{blue}{\texttt{1}} \ \ \color{red}{\texttt{0}} \\ 3: \ \ \ \ \color{orange}{\texttt{0}} \ \ \color{green}{\texttt{0}} \ \ \color{blue}{\texttt{1}} \ \ \color{red}{\texttt{1}} & & 11: \ \ \ \ \color{orange}{\texttt{1}} \ \ \color{green}{\texttt{0}} \ \ \color{blue}{\texttt{1}} \ \ \color{red}{\texttt{1}} \\ 4: \ \ \ \ \color{orange}{\texttt{0}} \ \ \color{green}{\texttt{1}} \ \ \color{blue}{\texttt{0}} \ \ \color{red}{\texttt{0}} & & 12: \ \ \ \ \color{orange}{\texttt{1}} \ \ \color{green}{\texttt{1}} \ \ \color{blue}{\texttt{0}} \ \ \color{red}{\texttt{0}} \\ 5: \ \ \ \ \color{orange}{\texttt{0}} \ \ \color{green}{\texttt{1}} \ \ \color{blue}{\texttt{0}} \ \ \color{red}{\texttt{1}} & & 13: \ \ \ \ \color{orange}{\texttt{1}} \ \ \color{green}{\texttt{1}} \ \ \color{blue}{\texttt{0}} \ \ \color{red}{\texttt{1}} \\ 6: \ \ \ \ \color{orange}{\texttt{0}} \ \ \color{green}{\texttt{1}} \ \ \color{blue}{\texttt{1}} \ \ \color{red}{\texttt{0}} & & 14: \ \ \ \ \color{orange}{\texttt{1}} \ \ \color{green}{\texttt{1}} \ \ \color{blue}{\texttt{1}} \ \ \color{red}{\texttt{0}} \\ 7: \ \ \ \ \color{orange}{\texttt{0}} \ \ \color{green}{\texttt{1}} \ \ \color{blue}{\texttt{1}} \ \ \color{red}{\texttt{1}} & & 15: \ \ \ \ \color{orange}{\texttt{1}} \ \ \color{green}{\texttt{1}} \ \ \color{blue}{\texttt{1}} \ \ \color{red}{\texttt{1}} \\ \end{align}\]这个公式我们可以不关注,我们只需要这个公式有下面的几个性质:
一、这个向量越靠后的元素值越固定,也就是越不会变:
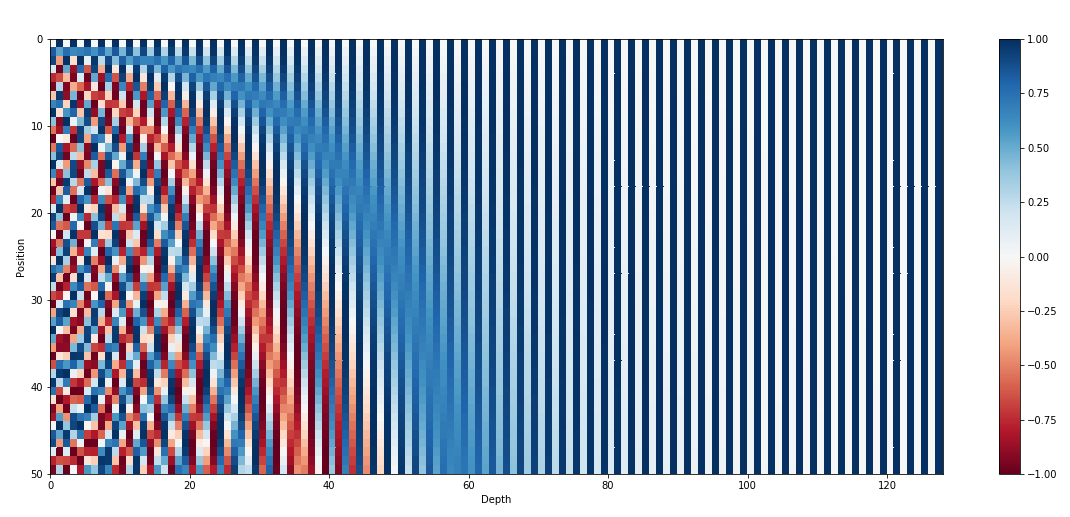
用更加科学的话来说,就是越靠后的位置波长越长、频率越低,位置越靠前频率越高。
二、相对性。存在一个和 $t$ 无关的线性变换,记为矩阵 $M$,能够满足:
\[\begin{array}{c} M.\begin{bmatrix} \sin(\omega_k . t) \\ \cos(\omega_k . t) \end{bmatrix} = \begin{bmatrix} \sin(\omega_k . (t + \phi)) \\ \cos(\omega_k . (t + \phi)) \end{bmatrix} \end{array}\]这个矩阵是:
\[\begin{array}{c} M_{\phi,k} = \begin{bmatrix} \cos(\omega_k .\phi) & \sin(\omega_k .\phi) \\ - \sin(\omega_k . \phi) & \cos(\omega_k .\phi) \end{bmatrix} \end{array}\]可以看仅仅和要变化的角度和位置向量中的位置有关系,和 token 位置没有关系:如果距离一定,那么 $\phi$ 可以固定下来,那么这个仅仅和位置 $k$ 有关系了;因此我们可以说每两个位置 $t$ 的位置向量都变换了一个固定的角度。也就满足了我们上面的要求 2。
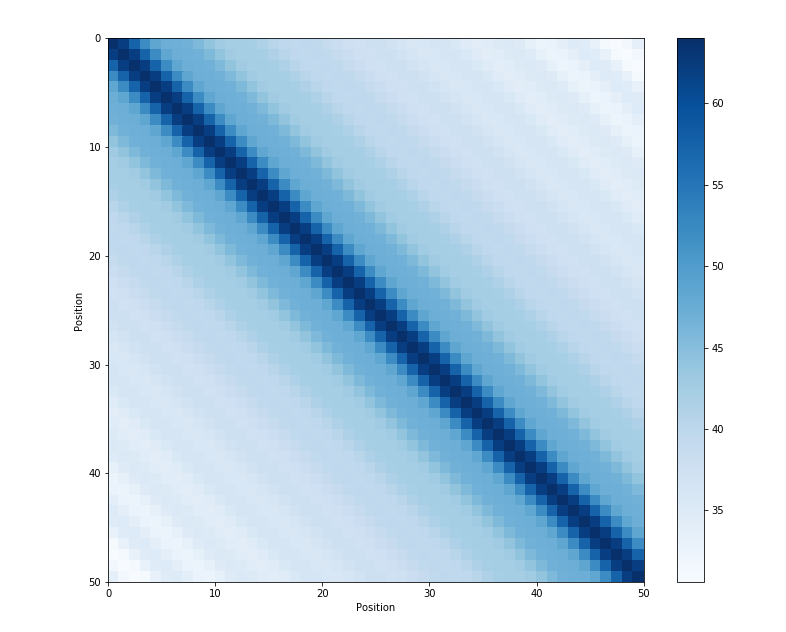
三、距离对称性:token $t$ 和 token $k$ 的距离 == token $k$ 到 token $t$ 的距离。
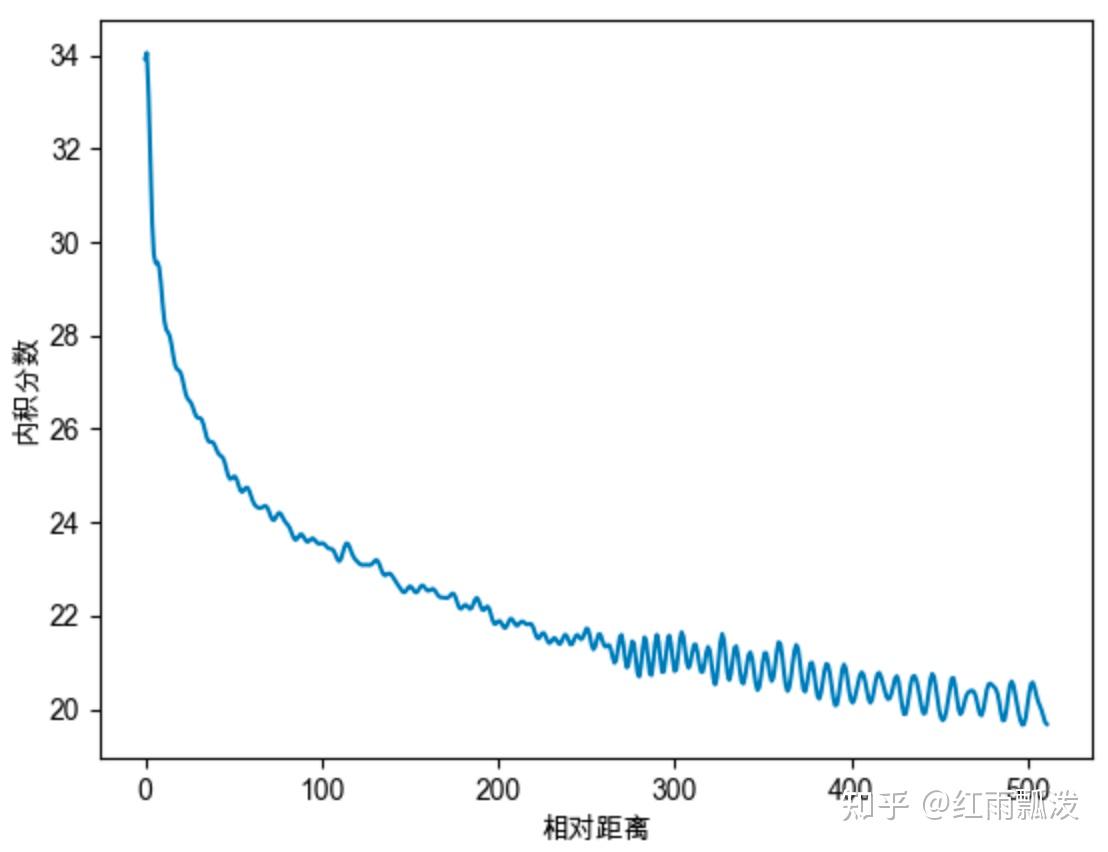
四、远程衰减性:距离越近,则他们的位置向量内积分数越高,反之则越低。不需要记住为什么远程衰减性为什么重要,只需要记住其和大模型的外推性有关系(也就是学的都是一定长度的 token,用的时候反而更长了)。
下面这个是位置向量的点乘,可见距离越远,越不相关,因为点乘值越小,也就越正交。
为什么不是直接 append 到 embedding 后面,而是直接加到词向量上?
一个可能的原因,这样更加节省参数量。
旋转位置编码 RoPE
加了位置信息的 token 的 $q$ 和 $k$ 为:$q_m = f(q,m)$, $k_m = f(k, m)$,$m$ 表示 token 位置,那么,我们希望 attention 信息中能有两个 token 之间的相对位置信息,即:
\[q_m \cdot k_n = g(q,k,m-n)\]我们有一个参数和位置 $m$ 有关的旋转矩阵 $R_m$,在我们的 token 嵌入向量转换成 $q$, $k$ 向量之后,可以进一步给 $q, k$ 加入位置信息。这个矩阵有以下性质(怎么推导暂时不表):
\[q_m \cdot k_n = (R_m q)^T \times (R_nk) = q^T R_{n-m} k\]这个编码的好处是,对于位置信息的编码完全取决于 $n-m$,而不是取决于 $n$ 或者是 $m$ 的绝对值。也就是位置 0 到位置 1 与位置 50 到 51 的距离是一样的。$R_m$ 也有一个参数 $\theta$,可以用来调整每次旋转的角度的大小,这个其实不难想象。
在多维空间下,角度当然也是可以拆分的。
更详细的还是看这篇参考资料:(11 封私信 / 80 条消息) 图解RoPE旋转位置编码及其特性 - 知乎 只需要知道最后的计算方法是:
\[\begin{array}{c} \left(\begin{array}{c}q_0 \\ q_1 \\ q_2 \\ q_3 \\ \vdots \\ q_{d-2} \\ q_{d-1}\end{array}\right) \otimes\left(\begin{array}{c}\cos m \theta_0 \\ \cos m \theta_0 \\ \cos m \theta_1 \\ \cos m \theta_1 \\ \vdots \\ \cos m \theta_{d / 2-1} \\ \cos m \theta_{d / 2-1}\end{array}\right)+\left(\begin{array}{c}-q_1 \\ q_0 \\ -q_3 \\ q_2 \\ \vdots \\ -q_{d-1} \\ q_{d-2}\end{array}\right) \otimes\left(\begin{array}{c}\sin m \theta_0 \\ \sin m \theta_0 \\ \sin m \theta_1 \\ \sin m \theta_1 \\ \vdots \\ \sin m \theta_{d / 2-1} \\ \sin m \theta_{d / 2-1}\end{array}\right)\\ \end{array}\]我们需要计算拿到的编码向量其实就是 $cos$ 向量和 $sin$ 向量。计算的时候使用 $Q$ 矩阵及改之后的 $Q$ 矩阵来分别乘以这两个向量并相加即可。
看一下实现吧:
# 这里实现了纯文本的和多模态的支持,取决于 Positions 这个向量的形状
# Query 和 key 的形状可以看出来,是 multihead attention
# Query 就是 Q 矩阵,key 就是 K 矩阵
@torch.compile(dynamic=True)
def forward(
self,
positions: torch.Tensor,
query: torch.Tensor,
key: torch.Tensor,
) -> Tuple[torch.Tensor, torch.Tensor]:
"""PyTorch-native implementation equivalent to forward().
Args:
positions:
[num_tokens,] (text only) or
[3, num_tokens] (T/H/W positions with multimodal inputs)
query: [num_tokens, num_heads * head_size]
key: [num_tokens, num_kv_heads * head_size]
"""
assert positions.ndim == 1 or positions.ndim == 2
num_tokens = positions.shape[-1]
#上面的 sin 和 cos 两个向量,因为仅仅和位置有关系,所以我们缓存起来
cos_sin = self.cos_sin_cache[positions]
#cos sin 分成两个 tensor
cos, sin = cos_sin.chunk(2, dim=-1)
#mrope,我们暂时先忽略这块
if positions.ndim == 2:
assert self.mrope_section
cos = torch.cat(
[m[i] for i, m in enumerate(cos.split(self.mrope_section, dim=-1))],
dim=-1,
)
sin = torch.cat(
[m[i] for i, m in enumerate(sin.split(self.mrope_section, dim=-1))],
dim=-1,
)
query_shape = query.shape
#head_size 表示每一个 head 的列数,把 Q 矩阵按照 MHA 的方式,也就是沿着列的维度进行拆分。
#按照 head_size 拆成 n 个 head。query 这个 tensor 从 2 维变成了 3 维。
query = query.view(num_tokens, -1, self.head_size)
#self.rotary_dim 是一个
query_rot = query[..., : self.rotary_dim]
query_pass = query[..., self.rotary_dim :]
#计算得到加入了 rotary_embedding 信息之后的 query
query_rot = _apply_rotary_emb(query_rot, cos, sin, self.is_neox_style)
#
query = torch.cat((query_rot, query_pass), dim=-1).reshape(query_shape)
key_shape = key.shape
key = key.view(num_tokens, -1, self.head_size)
key_rot = key[..., : self.rotary_dim]
key_pass = key[..., self.rotary_dim :]
key_rot = _apply_rotary_emb(key_rot, cos, sin, self.is_neox_style)
key = torch.cat((key_rot, key_pass), dim=-1).reshape(key_shape)
return query, key
def _apply_rotary_emb(
x: torch.Tensor,
cos: torch.Tensor,
sin: torch.Tensor,
is_neox_style: bool,
) -> torch.Tensor:
"""
Args:
x: [num_tokens, num_heads, head_size]
cos: [num_tokens, head_size // 2]
sin: [num_tokens, head_size // 2]
is_neox_style: Whether to use the Neox-style or GPT-J-style rotary
positional embeddings.
"""
#给倒数第二列加一个维度
#[num_tokens, 1, head_size // 2]
cos = cos.unsqueeze(-2).to(x.dtype)
#给倒数第二列加一个维度
#[num_tokens, 1, head_size // 2]
sin = sin.unsqueeze(-2).to(x.dtype)
if is_neox_style:
x1, x2 = torch.chunk(x, 2, dim=-1)
else:
#下面两行表示把 x 按照最后一列分成了两部分。
#表示在最后一维上,每隔 2 个取 1 个元素,从 索引 0 开始。
x1 = x[..., ::2]
#表示在最后一维上,从索引 1 开始,每隔 2 个取 1 个。
x2 = x[..., 1::2]
#非常好理解,看上面的最终的矩阵乘公式就行了。
o1 = x1 * cos - x2 * sin
o2 = x2 * cos + x1 * sin
if is_neox_style:
return torch.cat((o1, o2), dim=-1)
else:
#首先按元素堆叠,也就是把上面的计算结果聚合起来
#堆叠完之后是 [[1, 2], [3, 4]...] 的状态,因此需要 flatten 来展平
return torch.stack((o1, o2), dim=-1).flatten(-2)
一些思考:
- 当 $\theta$ 固定后,两个编码向量仅仅和 $m$ 也就是 token 的位置有关系。我们可以为每一个位置提前计算出来这两个向量,在每轮对话的时候复用这两个向量就好了。
- RoPE 相比于原来的编码(或者叫Sinusoidal 位置编码),区别在于 RoPE 不是直接计算一个向量加上原来的 embedding 向量上了。而是直接用一个函数来对 $q, k$ 向量来计算 $q_m = f(q, m)$。
M-RoPE
多模态场景下的 RoPE。
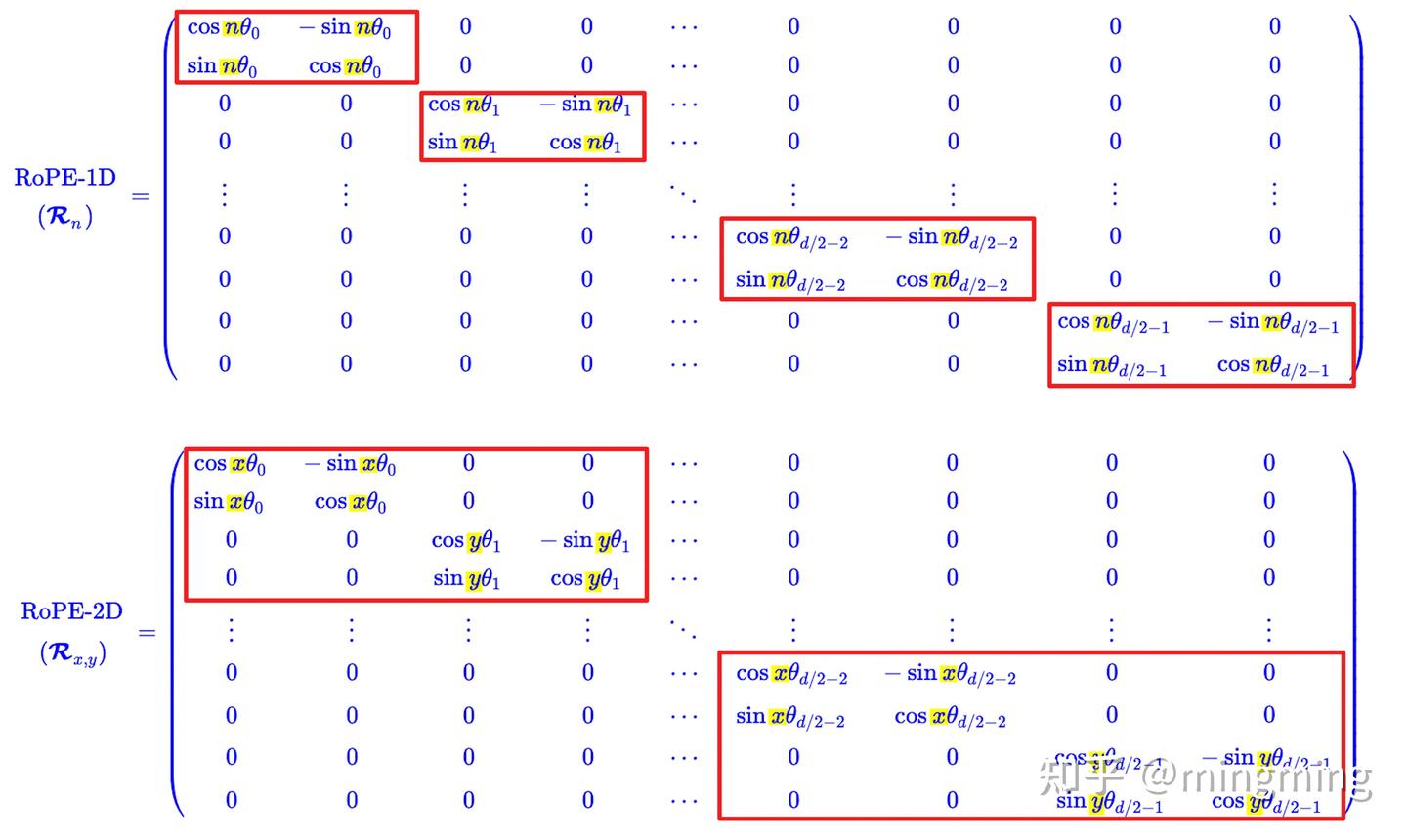
M-ROPE 通过将原始旋转嵌入分解为代表时间、高度和宽度的三个部分,使得大规模语言模型能够同时捕捉和整合一维文本序列、二维视觉图像以及三维视频的位置信息。
- 文本使用了第一维,也就是时间,矩阵是两两一组,位置用 $n$ 来表示;
- 图像使用了二三维,也就是高度和宽度,矩阵是四四一组,位置用 $(x,y)$ 来表示;
- 视频使用了一二三维,也就是时间高度和宽度,矩阵是六六一组,位置用 $(n,x,y)$ 来表示。
从计算上来说的区别:
注意下面公式每四行是一组: $$
\begin{array}{c} \left(\begin{array}{c}q_0 \ q_1 \ q_2 \ q_3 \ \vdots \ q_{d-4} \ q_{d-3} \ q_{d-2} \ q_{d-1}\end{array}\right) \otimes\left(\begin{array}{c} \cos x \theta_0 \ \cos x \theta_0 \ \cos y \theta_1 \ \cos y \theta_1 \ \vdots \ \cos x \theta_{d / 2-2} \ \cos x \theta_{d / 2-2} \ \cos y \theta_{d / 2-1} \ \cos y \theta_{d / 2-1}\end{array}\right)+\left(\begin{array}{c}-q_1 \ q_0 \ -q_3 \ q_2 \ \vdots \ -q_{d-3} \ q_{d-4} \ -q_{d-1} \ q_{d-2}\end{array}\right) \otimes\left(\begin{array}{c}\sin x \theta_0 \ \sin x \theta_0 \ \sin y \theta_1 \ \sin y \theta_1 \ \vdots \ \sin x \theta_{d / 2-2} \ \sin x \theta_{d / 2-2} \ \sin y \theta_{d / 2-1} \ \sin y \theta_{d / 2-1}\end{array}\right)\ \end{array}
$$ 单从计算上来说,并不会增加更多的计算量。$q$ 矩阵不用变,唯一需要变的就是 $cos$ 和 $sin$ 的这两个向量。
下面看 SGLang 里的代码:
# 这里实现了纯文本的和多模态的支持,取决于 Positions 这个向量的形状
# Query 和 key 的形状可以看出来,是 multihead attention
# Query 就是 Q 矩阵,key 就是 K 矩阵
@torch.compile(dynamic=True)
def forward(
self,
positions: torch.Tensor,
query: torch.Tensor,
key: torch.Tensor,
) -> Tuple[torch.Tensor, torch.Tensor]:
"""PyTorch-native implementation equivalent to forward().
Args:
positions:
[num_tokens,] (text only) or
[3, num_tokens] (T/H/W positions with multimodal inputs)
query: [num_tokens, num_heads * head_size]
key: [num_tokens, num_kv_heads * head_size]
"""
assert positions.ndim == 1 or positions.ndim == 2
num_tokens = positions.shape[-1]
#上面的 sin 和 cos 两个向量,因为仅仅和位置有关系,所以我们缓存起来
cos_sin = self.cos_sin_cache[positions]
#cos sin 分成两个 tensor
cos, sin = cos_sin.chunk(2, dim=-1)
#mrope
if positions.ndim == 2:
#这是一个
assert self.mrope_section
#根据 sections 计算上面的两个向量
cos = torch.cat(
[m[i] for i, m in enumerate(cos.split(self.mrope_section, dim=-1))],
dim=-1,
)
#根据 sections 计算上面的两个向量
sin = torch.cat(
[m[i] for i, m in enumerate(sin.split(self.mrope_section, dim=-1))],
dim=-1,
)
query_shape = query.shape
#head_size 表示每一个 head 的列数,把 Q 矩阵按照 MHA 的方式,也就是沿着列的维度进行拆分。
#按照 head_size 拆成 n 个 head。query 这个 tensor 从 2 维变成了 3 维。
query = query.view(num_tokens, -1, self.head_size)
#self.rotary_dim 是一个
query_rot = query[..., : self.rotary_dim]
query_pass = query[..., self.rotary_dim :]
#计算得到加入了 rotary_embedding 信息之后的 query
query_rot = _apply_rotary_emb(query_rot, cos, sin, self.is_neox_style)
#
query = torch.cat((query_rot, query_pass), dim=-1).reshape(query_shape)
key_shape = key.shape
key = key.view(num_tokens, -1, self.head_size)
key_rot = key[..., : self.rotary_dim]
key_pass = key[..., self.rotary_dim :]
key_rot = _apply_rotary_emb(key_rot, cos, sin, self.is_neox_style)
key = torch.cat((key_rot, key_pass), dim=-1).reshape(key_shape)
return query, key
def _apply_rotary_emb(
x: torch.Tensor,
cos: torch.Tensor,
sin: torch.Tensor,
is_neox_style: bool,
) -> torch.Tensor:
"""
Args:
x: [num_tokens, num_heads, head_size]
cos: [num_tokens, head_size // 2]
sin: [num_tokens, head_size // 2]
is_neox_style: Whether to use the Neox-style or GPT-J-style rotary
positional embeddings.
"""
#给倒数第二列加一个维度
#[num_tokens, 1, head_size // 2]
cos = cos.unsqueeze(-2).to(x.dtype)
#给倒数第二列加一个维度
#[num_tokens, 1, head_size // 2]
sin = sin.unsqueeze(-2).to(x.dtype)
if is_neox_style:
x1, x2 = torch.chunk(x, 2, dim=-1)
else:
#下面两行表示把 x 按照最后一列分成了两部分。
#表示在最后一维上,每隔 2 个取 1 个元素,从 索引 0 开始。
x1 = x[..., ::2]
#表示在最后一维上,从索引 1 开始,每隔 2 个取 1 个。
x2 = x[..., 1::2]
#非常好理解,看上面的最终的矩阵乘公式就行了。
o1 = x1 * cos - x2 * sin
o2 = x2 * cos + x1 * sin
if is_neox_style:
return torch.cat((o1, o2), dim=-1)
else:
#首先按元素堆叠,也就是把上面的计算结果聚合起来
#堆叠完之后是 [[1, 2], [3, 4]...] 的状态,因此需要 flatten 来展平
return torch.stack((o1, o2), dim=-1).flatten(-2)
参考资料:
求物之妙,如系风捕景,能使是物了然于心者,千万人而不一遇也。