结合值函数与策略函数的强化学习算法
带基准线的 REINFORCE 算法
REINFORCE 算法的一个主要缺点是不同路径之间的方差很大,导致训练不稳定,这是在高维空间中使用蒙特卡罗方法的的通病。一种减少方差的通用方法是引入一个控制变量。
应该也既不属于基于值函数的,也不属于基于策略函数的算法,因为结合了两者。
和 REINFORCE 算法的区别:
- REINFORCE 是基于绝对值(绝对的总奖励值)来指导参数更新;带基准线的 REINFORCE 是基于相对值(总奖励值减去值函数值)来指导参数更新。
- 在学习过程中,值函数也会同步进行更新。
| ![[nndl-book.pdf#page=363&rect=33,325,361,535&color=annotate | nndl-book, p.348]] |
Actor-Critic 算法
Actor-Critic 算法和带基准线的 REINFORCE 算法非常接近,区别在于后者需要一个轨迹才会更新一步,而前者在每次状态转移后都会更新。
在 $REINFORCE$ 算法中,每次需要根据一个策略采集一条完整的轨迹,并计算这条轨迹上的回报。这种采样方式的方差比较大,学习效率也比较低。我们可以借鉴时序差分学习的思想,使用动态规划方法来提高采样的效率,即从状态开始 $s$ 的总回报可以通过当前动作的即时奖励 $r(s,a,s^{\prime})$ 和下一个状态 $s^{\prime}$ 的值函数来近似估计。
演员评论员算法(Actor-Critic Algorithm)既不属于基于值函数的学习方法,也不属于基于策略函数的学习方法,它是结合策略梯度和时序差分学习的强化学习方法。
演员(Actor)
演员(Actor)是指策略函数 $\pi_{\theta}(s, a)$,即学习一个策略来得到尽量高的回报。
评论员(Critic)
评论员(Critic)是指值函数 $V_{\phi}(s)$,对当前策略的值函数进行估计,即评估 Actor 的好坏。借助于值函数,Actor-Critic 算法可以进行单步更新参数,不需要等到回合结束才进行更新。
在该算法中,策略函数 $\pi_{\theta}(s, a)$ 和值函数 $V_{\phi}(s)$ 都是待学习的函数,需要在训练中同时学习。
训练过程
假设从时刻 $t$ 开始的回报 $G\left(\tau_{t : T}\right)$,我们用下面公式计算。
\[\hat{G}\left(\tau_{t : T}\right)=r_{t+1}+\gamma V_{\phi}\left(s_{t+1}\right)\]其中 $s_{t+1}$ 是 $t+1$ 时刻的状态,$r_{t+1}$ 是即时奖励。
在每步更新中,分别进行策略函数 $\pi_{\theta}(s,a)$ 和值函数 $V_{\phi}(s)$ 的学习。一方面,更新参数 $\phi$ 使得值函数 $V_{\phi}(s_{t})$ 接近于估计的真实回报 $\hat{G}\left(\tau_{t : T}\right)$。
\[\min _{\phi}\left(\hat{G}\left(\tau_{t : T}\right)-V_{\phi}\left(s_{t}\right)\right)^{2}\]另一方面,将值函数$V_{\phi}(s_{t})$ 作为基函数来更新策略函数的参数 $\theta$,减少策略梯度的方差。
\[\theta \leftarrow \theta+\alpha \gamma^{t}\left(\hat{G}\left(\tau_{t : T}\right)-V_{\phi}\left(s_{t}\right)\right) \frac{\partial}{\partial \theta} \log \pi_{\theta}\left(a_{t} | s_{t}\right)\]在每步更新中:
- 演员根据当前的环境状态 $s$ 和策略 $\pi_{\theta}$ 去执行动作 $a$,环境状态变为 $s^{\prime}$,并到即时奖励 $r$。
- 评论员根据环境给出的真实奖励和之前标准下的打分 $\left(r+\gamma V_{\phi}\left(s^{\prime}\right)\right)$,来调整自己的打分标准,使得自己 的评分更接近环境的真实回报。
- 演员则跟据评论员的打分,调整自己的策略 $\pi_{\theta}$,争取下次做得更好。
开始训练时,演员随机表演,评论员随机打分。通过不断的学习,评论员的评分越来越准,演员的动作越来越好。
通用算法框架:一个示例
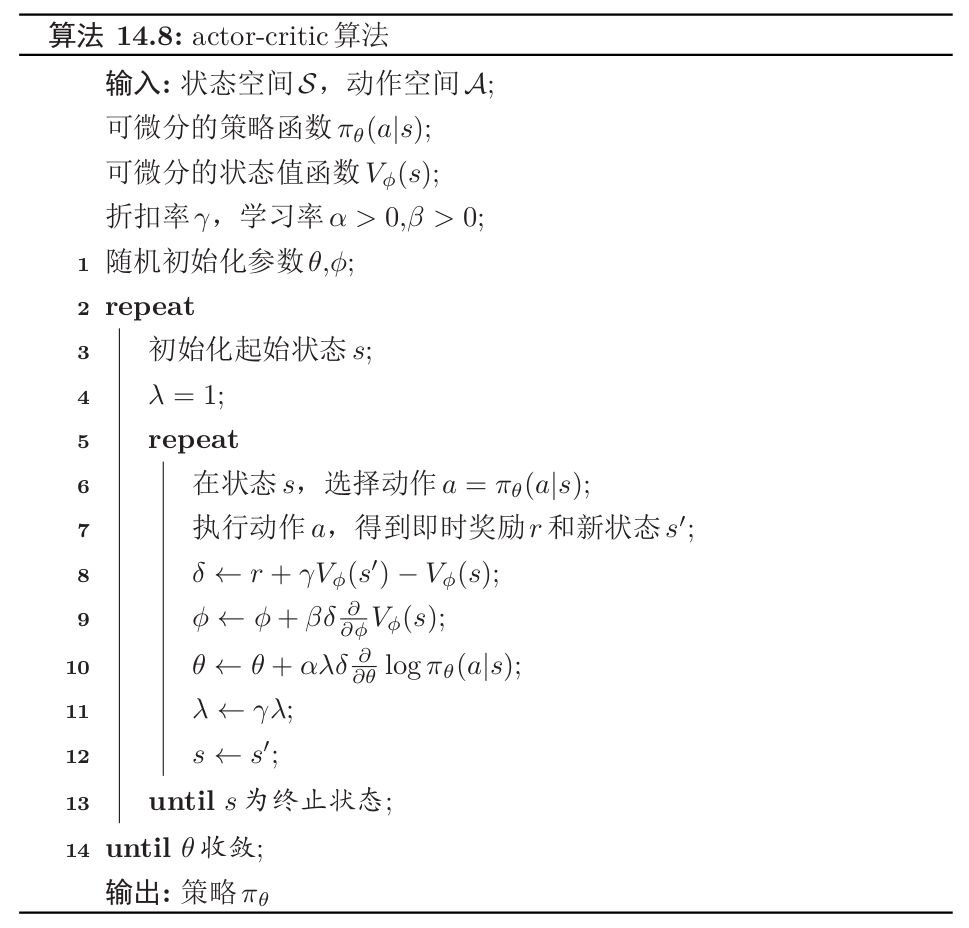
由于我们最后希望得到一个策略,所以大循环中终止目标是策略函数的参数 $\theta$ 收敛。
- 外部循环在参数 $\theta$ 收敛后停止。
- 内部循环中,首先演员表演,得到蒙特卡洛误差 $\delta$,并利用该参数更新值函数参数 $\phi$ 和演员参数 $\theta$,并降低更新步长参数 $\lambda$。内部循环到终止状态时结束。
求物之妙,如系风捕景,能使是物了然于心者,千万人而不一遇也。