NS3Gym工作流程
NS3Gym的工作流程主要涉及到两个端,六个类。接下来主要根据这些来分别进行讨论。
Agent端(Python端)
Agent端的主要代码文件位于src/opengym/model/ns3gym/ns3gym目录下面,其中ns3env.py是主要代码文件,start_sim.py是用来自动启动环境段脚本的文件,可以不关注。agent端主要的两个类的主要的定义都在ns3env.py文件里。分别是Ns3ZmqBridge类和Ns3Env类(继承了gym.Env)。
Ns3Env
这个类模拟的不是真正的环境端,而是作为我们与真实的环境端(C++端)通信的代理。这个类在初始化时会进行:
recv -> send -> recv
的操作。前两次是接受环境端的信息(进程以及waf进程的id)并发送确认信息,后一次是接受来自于环境的初始状态。与初始化操作执行相同流程的函数有reset函数。
除此之外,这个类当中的step函数是面向于用户的一个接口,模拟了真实的gym库中的step函数,这个函数的通信流程为:
send -> recv
第一个send用来发送基于上一状态所决策的动作信息,第二个recv用来接受环境端所返回的下一个状态,这个函数的流程可以与初始化函数以及reset函数无缝地衔接在一起,构成:
recv -> send -> recv -> send -> recv -> ...
的通信链,从而很好地模拟了马尔可夫决策过程。
另一个值得一提的函数是close函数,这个函数发送一个结束信息stopSim来使得环境端结束模拟并关闭。
Ns3ZmqBridge
顾名思义,这个类的主要作用是和环境端进行通信,其实例作为一个Ns3Env实例的成员变量,从而构成关联关系。这个类中的主要函数有:
initialize_env
这个函数的通信流程为:
recv -> send
首先接受环境端的进程id信息,然后发送一个ACK。
rx_env_state
接受当前状态,这个函数的通信流程为:
[recv] -> [send]
其通信流程有三种可能:
-
不接受,也不发送。这种情况是因为新的状态还没有被读取,所以不用再接受信息了;
-
接受,不发送。这种情况是正常情况,这个函数本身仅仅负责接收状态就好了;
-
接收,发送。这种情况发生在接收到关闭请求时,同时发送关闭请求。其中关闭请求有两种情况:
- SimulationEnd:也就是环境端返回的模拟结束(环境端需要调用
NotifySimulationEnd函数),表示整个学习流程结束。这种情况关闭agent进程; - 其他原因:这种情况返回的是游戏结束(环境端
GetGameOver函数返回了True),表示当前episode结束。这种情况保留agent进程,但是仍旧需要调用env.reset()来重新启动一个环境实例。
这两种情况对应的代码如下:
if self.gameOver: if self.gameOverReason == pb.EnvStateMsg.SimulationEnd: self.envStopped = True self.send_close_command() sys.exit() else: self.forceEnvStop = True self.send_close_command()self.envStopped变量表示当前环境进程已经结束,用来防止调用env.close()函数时再次发送关闭请求。self.forceEnvStop变量表示强制环境端结束,用来保证在执行send_actions()函数时把环境结束的请求带过去。 - SimulationEnd:也就是环境端返回的模拟结束(环境端需要调用
Env端(C++端)
这个端的文件主要位于src/opengym/model目录下面,主要包含的类有两个,即OpenGymInterface与OpenGymEnv类,其中最主要的是OpenGymInterface类,同样,后者把前者作为成员变量,两者构成关联关系。
OpenGymEnv
这个类主要提供给用户进行继承并定义自己的环境。其中包含了主要的七个纯虚函数:
virtual Ptr<OpenGymSpace> GetActionSpace() = 0;
virtual Ptr<OpenGymSpace> GetObservationSpace() = 0;
virtual bool GetGameOver() = 0;
virtual Ptr<OpenGymDataContainer> GetObservation() = 0;
virtual float GetReward() = 0;
virtual std::string GetExtraInfo() = 0;
virtual bool ExecuteActions(Ptr<OpenGymDataContainer> action) = 0;
基于此类的子类需要实现这些纯虚函数,以使得环境能够得到这些信息从而移交给agent端。
除此之外,这个类中还有一个成员函数:
void SetOpenGymInterface(Ptr<OpenGymInterface> openGymInterface);
这个函数用来设置自己的通信接口实例,并将上面的七个接口函数设置为回调函数,在必要时进行调用。
另外两个函数:
void Notify();
void NotifySimulationEnd();
只是对于OpenGymInterface中相同名字函数的封装,无需赘述。
OpenGymInterface
这个类提供了一个通信的接口,用来与agent端进行通信。主要函数有:
Init
与Ns3ZmqBridge中的initialize_env函数类似,这个函数执行的是环境端的初始化,这个函数的通信流程为:
send -> recv
正好与initialize_env相反。这个函数将当前的一些进程信息发送给agent端,并接受agent端的确认信息。
NotifyCurrentState
这个函数是核心函数,不管是此类中的Notify、NotifySimulationEnd、WaitForStop函数还是OpenGymEnv类中的Notify、NotifySimulationEnd函数都使用这个函数进行通信。
这个函数的执行流程对应于agent端的step函数,这个函数的通信流程也与之相同:
send -> recv
前者发送状态信息,后者接受新的动作。
NotifySimulationEnd/WaitForStop
这两个函数用来通知模拟的结束,其会设置一个核心变量m_simEnd,然后将结束请求发送到agent端,从而结束模拟过程。
工作流程图
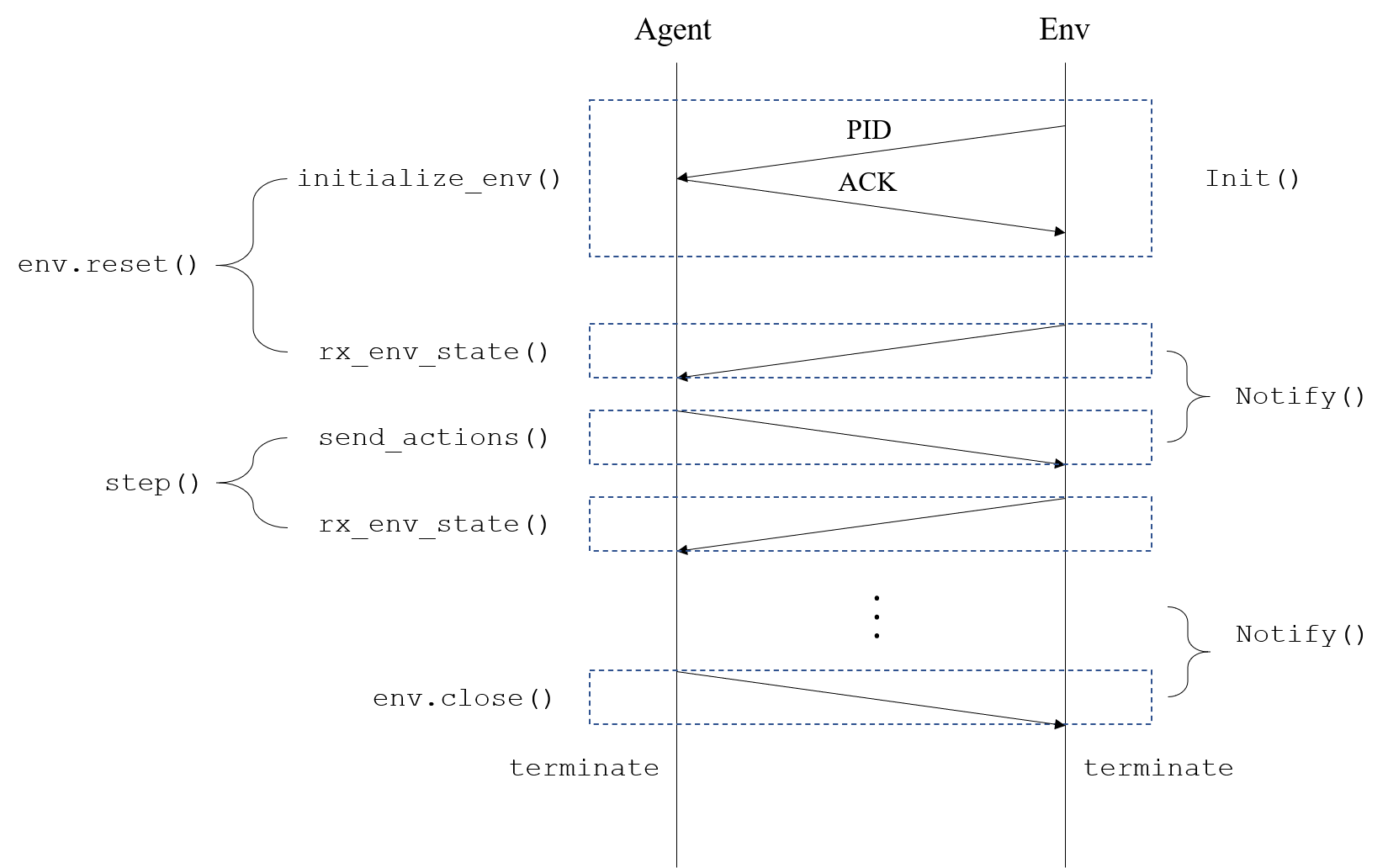
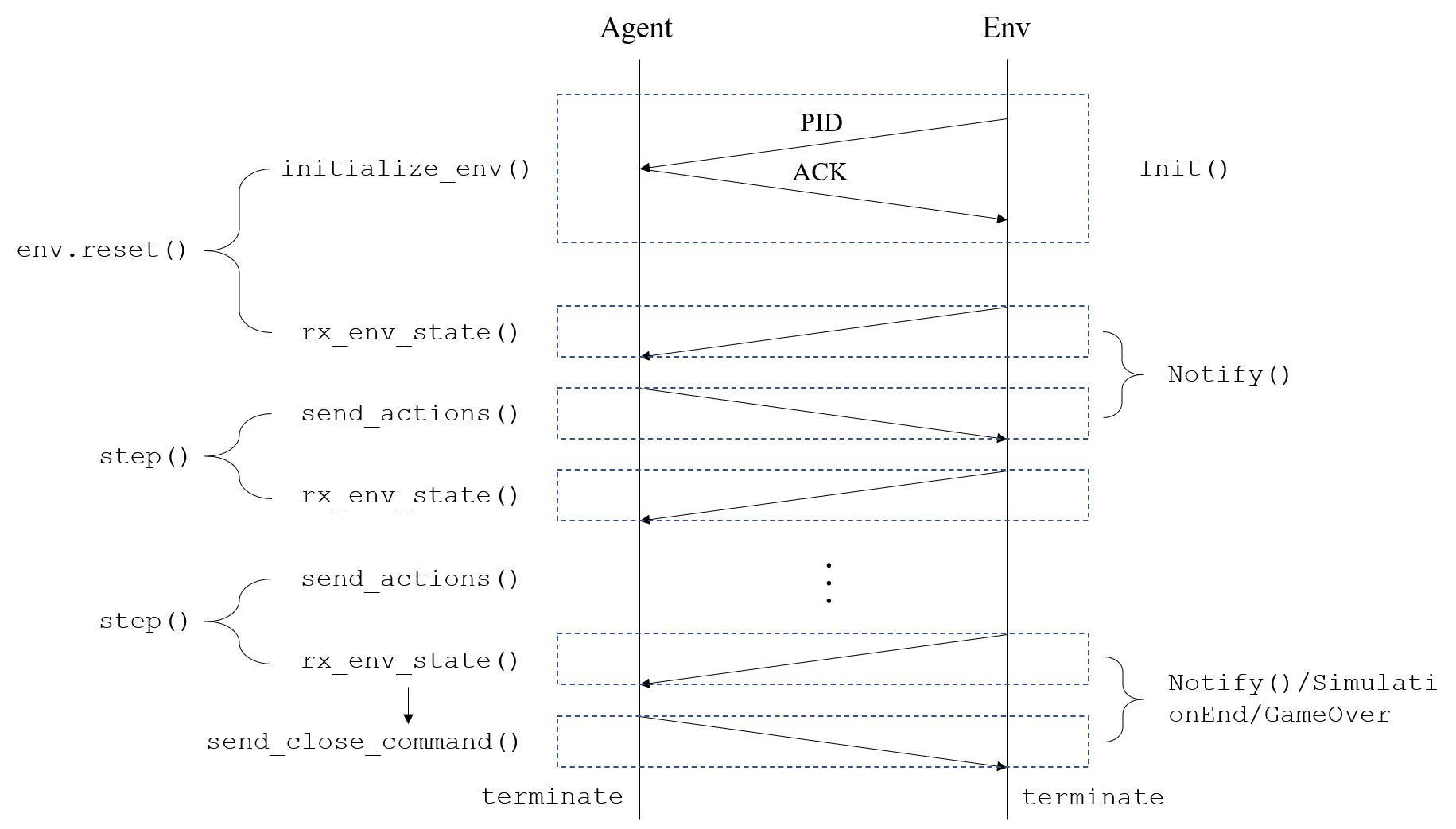
工作流程分成两个类型,第一种类型是由agent端关闭(主动关闭),另一种类型是由env端关闭(被动关闭)。
Agent关闭(主动关闭)
Env关闭(被动关闭)
求物之妙,如系风捕景,能使是物了然于心者,千万人而不一遇也。