什么是强化学习
什么是强化学习
强化学习是一种十分吸引人的机器学习方法,通过智能体不断与环境进行交互,并根据经验调整其策略来最大化其长远的所有奖励的累积值。强化学习更接近生物学习的本质,可以应对多种复杂的场景,而从更接近通用人工智能 系统的目标。
目前,机器学习分为四类:
- 监督学习。
- 无监督学习。
- 半监督学习。
- 强化学习。
强化学习即为其中的一种。
强化学习和监督学习的区别在于:
- 强化学习的样本通过与环境进行交互产生,即试错学习,而监督学习的样本由人工收集并标注。
- 强化学习的反馈信息只有奖励,并且是延迟的;而监督学习需要明确的指导信息(每一个状态对应的动作)。
现代强化学习可以追溯到两个来源:
- 一个是心理学中的行为主义理论,即有机体如何在环境给予的奖励或惩罚的刺激下,逐步形成对刺激的预期,产生能获得最大利益的习惯性行为;
- 另一个是控制论领域的最优控制问题,即在满足一定约束条件下,寻求最优控制策略,使得性能指标取极大值或极小值。
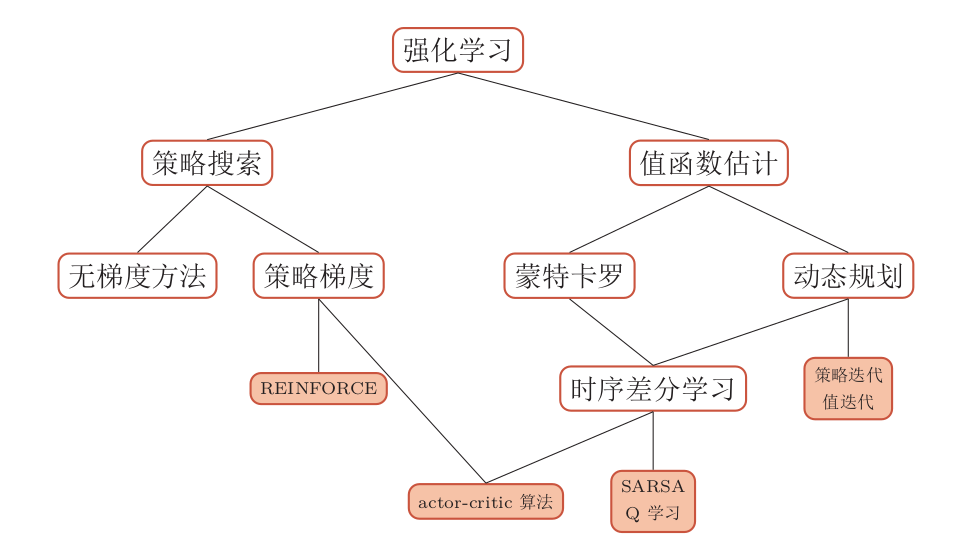
强化学习的算法分为以下几类:
更加泛化的强化学习
部分可观测马尔可夫决策过程
部分可观测马尔可夫决策过程(Partially Observable Markov Decision Processes, POMDP)是一个马尔可夫决策过程的泛化。POMDP依然具有马尔可夫性,但是假设智能体无法感知环境的状态$s$,只能知道部分观测值$o$。比如在自动驾驶中,智能体只能感知传感器采集的有限的环境信息。
逆向强化学习
逆向强化学习(Inverse Reinforcement Learning, IRL)就是指一个不带奖励的马尔可夫决策过程,通过给定的一组专家(或教师)的行为轨迹示例来逆向估计出奖励函数$r\left(s, a, s^{\prime}\right)$来解释专家的行为,然后再进行强化学习。
分层强化学习
分层强化学习(Hierarchical Reinforcement Learning, HRL)是指将一个复杂的强化学习问题分解成多个小的、简单的子问题,每个子问题都可以单独用马尔可夫决策过程来建模。这样,我们可以将智能体的策略分为高层次策略和低层次策略,高层次策略根据当前状态决定如何执行低层次策略。这样,智能体就可以解决一些非常复杂的任务。
Leinux
求物之妙,如系风捕景,能使是物了然于心者,千万人而不一遇也。
🗞️ Recent Posts